04.15. Задачи и размышления
Задачи и размышления
Области применения векторной алгебры весьма разнообразны. Мы коснемся некоторых из них, рассматривая отдельные прикладные задачи и вопросы, относящиеся к самой математике.
В геометрии, как известно, большое внимание уделяется решению задач о треугольниках. Рассмотрим эту проблему с позиции векторной алгебры.
Не представляет никакого труда доказательство теорем косинусов и синусов.
Действительно, если в произвольном треугольнике две стороны задаются векторами ![]() и
и ![]() , то квадрат длины третьей, определяемой модулем вектора
, то квадрат длины третьей, определяемой модулем вектора ![]() , находится как скалярный квадрат разности
, находится как скалярный квадрат разности ![]() :
:
![]()
Где С – угол между векторами ![]() и
и ![]() .
.
Обозначая модули этих векторов просто через a, b и c, получим привычную запись теоремы косинусов:
![]()
Формула для площади треугольника очевидна:
![]()
Аналогично,
![]()
Где B – угол между векторами ![]() и
и ![]() ;
;
![]()
Где А – угол между векторами ![]() и
и ![]() .
.
Сравнивая эти формулы для вычисления площади треугольника (они также выводятся в школьном курсе), получим теорему синусов:
![]()
Формула вычисления биссектрисы треугольника может быть получена следующим образом.
Пусть ![]() – биссектриса угла треугольника (рис. 3.37), образованного векторами
– биссектриса угла треугольника (рис. 3.37), образованного векторами ![]() и
и ![]() . Обозначим орты векторов
. Обозначим орты векторов ![]() и
и ![]() соответственно через
соответственно через ![]() и
и ![]() . Тогда
. Тогда
![]()
Построим параллелограмм CDEF на векторах ![]() и
и ![]() как на сторонах. Параллелограмм CDEF – ромб.
как на сторонах. Параллелограмм CDEF – ромб.
Получим:
![]() (3.15)
(3.15)
Где ![]() – пока неизвестный скаляр.
– пока неизвестный скаляр.
С другой стороны, из треугольника СВК имеем:
![]() (3.16)
(3.16)
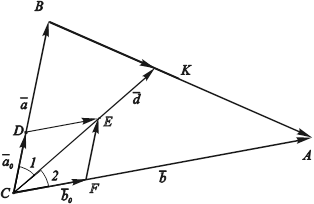 |
Рис. 3.37. Нахождение биссектрисы треугольника.
Но ![]() и
и ![]() – коллинеарен
– коллинеарен ![]() . Поэтому
. Поэтому
![]() (3.17)
(3.17)
Где скаляр ![]() тоже пока неизвестен.
тоже пока неизвестен.
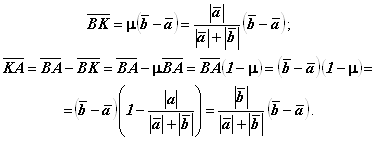
Подставляя выражение (3.17) в (3.16) и сравнивая с равенством (3.15), получим:
![]()
Или
![]()
Данное равенство следует рассматривать как уравнение относительно двух неизвестных ![]() и
и ![]() . Однако одного этого уравнения достаточно, чтобы найти оба неизвестных. Действительно, преобразуем его к виду
. Однако одного этого уравнения достаточно, чтобы найти оба неизвестных. Действительно, преобразуем его к виду
![]()
Но векторы ![]() и
и ![]() , как и векторы
, как и векторы ![]() и
и ![]() линейно независимы, поэтому должны обратиться в нуль скалярные коэффициенты при них:
линейно независимы, поэтому должны обратиться в нуль скалярные коэффициенты при них:
|
Всегда ли эта система совместна? Проиллюстрируйте геометрически условия ее несовместности. |
Из полученной системы двух линейных алгебраических уравнений относительно L И M Находим
![]()
Тогда

Найдем длину вектора ![]() как положительное значение корня из его скалярного квадрата:
как положительное значение корня из его скалярного квадрата:
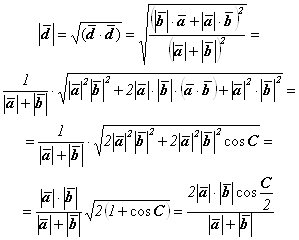
Или в привычных обозначениях:
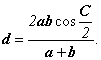
Эту формулу можно получить значительно проще. Выведите ее, используя тот факт, что площадь данного треугольника равна сумме площадей треугольников, на которые биссектриса его разбивает.
Попутно мы можем получить еще один результат:
Отсюда
 или
или ![]() ,
,
То есть получили иным путем известное свойство биссектрисы: Она Делит противолежащую сторону треугольника на части, пропорциональные прилежащим к ней сторонам.
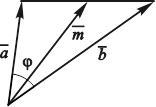
Рис. 3.38. Вычисление медианы треугольника.
Найдем одну из медиан треугольника (рис. 3.38). Очевидно, что
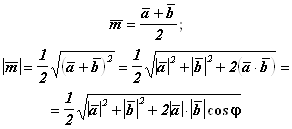
Или, в привычной форме записи,
![]()
А вот искать высоту треугольника с помощью векторной алгебры не имеет особого смысла, так как высота и без того находится легко (рис. 3.39):
|
Рис. 3.39. Вычисление |
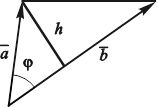
![]()
Рассмотрим прикладную задачу, при решении которой используется метод математического моделирования.
Вагон с контейнером удерживается в равновесии на наклонной плоскости при помощи перпендикулярного к ней рычага, имеющего шарнирную опору (рис. 3.40). Тросы, соединяющие рычаг с вагоном и контейнером, параллельны наклонной плоскости. Трос, связывающий верхний конец рычага с наклонной плоскостью, удерживает рычаг в заданном положении. Найти усилия в тросах и опорные реакции шарнира. В каком тросе и при каких условиях усилие будет наибольшим?
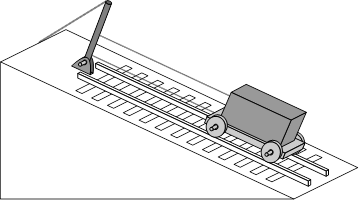
Рис. 3.40. Вагон с контейнером на наклонной плоскости.
Составим для данного технического объекта физическую схему исследования. Выдвинем гипотезы и сделаем соответствующие допущения.
1. Будем считать наклонную плоскость, вагон и контейнер сочлененной системой материальных тел, касающихся друг друга своими поверхностями.
2. Примем, что вагон и контейнер представляют собой блоки Б1 и Б2 соответственно, которые соприкасаются гладкими поверхностями и располагаются на гладкой наклонной плоскости (рис. 3.41).
3. Трением в тросах будем пренебрегать.
Чтобы составить физическую схему, необходимо:
· выделить твердое тело, равновесие которого мы изучаем;
· определить активные силы;
· рассмотреть равновесие несвободного тела как свободного, находящегося под действием активных сил и реакций связей;
· записать уравнения равновесия в соответствии с действующими силовыми факторами, что приведет нас к математическому описанию задачи.
В данной задаче мы будем изучать равновесие блоков Б1 и Б2, которые удерживаются в равновесии на наклонной плоскости натяжением троса, связывающего верхний конец рычага и наклонную плоскость. Тросы, связывающие рычаг с блоками, параллельны наклонной плоскости.
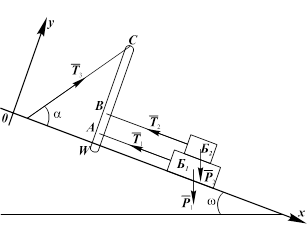
Рис. 3.41. Физическая расчетная схема системы двух блоков и рычага на наклонной плоскости.
Силовые факторы и геометрические характеристики исследуемой системы указаны на рис. 3.41.
![]() и
и ![]() веса блоков Б1 и Б2 соответственно;
веса блоков Б1 и Б2 соответственно;
![]() ,
, ![]() И
И ![]() – усилия в соответствующих тросах;
– усилия в соответствующих тросах;
W – угол наклона плоскости к горизонту;
A – угол, образуемый тросом, связывающим рычаг с наклонной плоскостью.
Примем, что ![]() ;
;![]() ;
;![]() .
.
Обозначим для простоты:
![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() .
.
При рассмотрении всей системы твердых тел реакции связей между этими телами не должны учитываться. Эти реакции не входят в уравнения равновесия, ибо являются внутренне взаимно уравновешивающими силами. Однако при рассмотрении равновесия каждого из тел по отдельности или группы тел, входящих в систему, соответствующие реакции связей, которые были мысленно расчленены, становятся внешними силами и должны входить в уравнение равновесия.
 |
 |
|
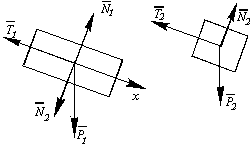
Рис. 3.42. Физическая расчетная схема блока Б1. |
Рис. 3.43. Физическая расчетная схема блока Б2. |
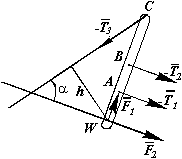
Рис. 3.44. Физическая расчетная схема рычага. |
Для исследования равновесия блоков рычага рассмотрим дополнительно три механические расчетные схемы (рис. 3.42-3.44), приняв следующие обозначения:
![]() – реакция наклонной плоскости;
– реакция наклонной плоскости;
![]() – реакция блока Б1;
– реакция блока Б1;
![]() и
и ![]() – составляющие реакции шарнира W в направлениях рычага и наклонной плоскости.
– составляющие реакции шарнира W в направлениях рычага и наклонной плоскости.
При математическом описании данных физических расчетных схем примем за основу утверждение о том, что для равновесия произвольной плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы сумма проекций всех сил оси прямоугольной декартовой системы координат и сумма моментов относительно произвольно выбранной точки равнялась нулю.
Рассмотрим равновесие каждого блока в отдельности и равновесие рычага. Выберем систему координат ![]() Так, как это указано на рис. 3.41. В этом случае силы
Так, как это указано на рис. 3.41. В этом случае силы ![]() ,
, ![]() ,
, ![]() и
и ![]() будут параллельны соответствующим координатным осям, что облегчает нахождение их проекций на координатные оси.
будут параллельны соответствующим координатным осям, что облегчает нахождение их проекций на координатные оси.
Блок Б2 находится в равновесии под действием трех сил: веса ![]() , натяжения
, натяжения ![]() , реакции блока Б1, равной
, реакции блока Б1, равной ![]() (рис. 3.43). Уравнения равновесия запишутся в виде:
(рис. 3.43). Уравнения равновесия запишутся в виде:

где ![]() ;
;![]() ;
;![]() . Отсюда получаем:
. Отсюда получаем:
![]()
Блок Б1 находится в равновесии под действием четырех сил: веса ![]() , натяжения
, натяжения ![]() , реакции блока Б2, равной
, реакции блока Б2, равной ![]() , и реакции наклонной плоскости
, и реакции наклонной плоскости ![]() (рис. 3.42). Уравнения равновесия запишутся в виде:
(рис. 3.42). Уравнения равновесия запишутся в виде:

Где ![]() ;
;![]() ;
;![]() .
.
Используя найденное значение ![]() , получим в результате решения системы:
, получим в результате решения системы:
![]()
Рассмотрим теперь равновесие рычага (рис. 3.44) под действием сил ![]() ,
, ![]() и
и ![]() – и реакции шарнира
– и реакции шарнира ![]() , которую мы представили в виде ее проекций
, которую мы представили в виде ее проекций ![]() и
и ![]() . В систему уравнений равновесия включим два уравнения проекций сил на координатные оси и уравнение их моментов относительно точки
. В систему уравнений равновесия включим два уравнения проекций сил на координатные оси и уравнение их моментов относительно точки ![]() :
:
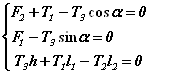 ,
,
Где ![]() ;
; ![]() ;
; ![]() , а
, а ![]() .
.
Решая эту систему уравнений, находим:
![]() ,
,
![]() ,
,
![]() .
.
Полученные результаты позволяют провести исследование усилий в тросах.
Найдите диапазон допустимых значений параметров, и исследуйте зависимость искомых величин последовательно от каждого из этих параметров. Составьте алгоритм решения этой задачи ЭВМ.
Следует подчеркнуть, что гипотезы, принятые в задаче, требуют обоснования. Это не всегда просто. Так, в частности, вагон представляет собой довольно сложную механическую систему, и когда встает проблема расчета элементов его конструкции, приходится учитывать огромное многообразие действующих силовых факторов. Не вдаваясь в детали, покажем лишь расчетную схему вагона с одинарным рессорным подвешиванием (рис. 3.45), приведенную в книге С. В. Вершинского, В. Н. Данилова, И. И. Челнокова «Динамика вагонов».

Рис. 3.45. Расчетная схема вагона с одинарным рессорным подвешиванием.
«Механическая система, состоящая из четырехосного вагона с жестким кузовом на рессорах одинарного центрального подвешивания и части верхнего строения пути, обладающей приведенной массой на упругом основании, при обычных связях (пятники, направляющие устройства) между ее элементами имеет 15 степеней свободы и в общем случае может иметь соответствующее количество видов колебаний: подпрыгивание, боковой относ, боковую качку, галопирование и влияние кузова (пять степеней свободы); подпрыгивание, боковую качку и галопирование тележек совместно с приведенной массой части верхнего строения пути (шесть степеней свободы); боковой относ и влияние тележек (четыре степени свободы)».
Пользуясь векторной алгеброй, можно доказать интересные свойства прямоугольных треугольников: если а и b – катеты, с – гипотенуза, A и B – произвольные константы, то
![]()
Действительно, рассмотрим векторы ![]() и
и ![]() .
.
Тогда
![]()
Или
![]()
Это свойство можно обобщить: если даны два прямоугольных треугольника (с катетами аi и bi и гипотенузой сi, i=1,2), то
![]()
Докажите это обобщение.
Вероятно, многие известные соотношения, имеющие место для других геометрических фигур, также можно обобщить или видоизменить, пользуясь аналогичными рассуждениями. Аппарат векторной алгебры применим к доказательству многих геометрических и алгебраических неравенств, исследованию геометрических мест точек, он является основой построения аналитической геометрии. Векторная алгебра находит неожиданные области применения в математическом анализе при изучении свойств функциональных зависимостей, систем уравнений. С отдельными вопросами из этого спектра проблем мы познакомимся в дальнейшем.
Красивые задачи, видимо, можно коллекционировать, как марки, и даже обмениваться ими. Приводимые ниже задачи, связанные с применением векторной алгебры, способны украсить любую коллекцию. Они взяты из книги З. А.Скопеца «Геометрические миниатюры».
1. Доказать, что для всякого треугольника АВС выполняется:
![]()
2. Доказать, что для всякого треугольника имеют место неравенства:
![]()
Где ![]() ,
, ![]() ,
, ![]() , R – радиус описанной вокруг треугольника окружности.
, R – радиус описанной вокруг треугольника окружности.
3. Вокруг окружности описан четырехугольник ABCD; противоположные стороны AB и CD, BC и AD лежат на прямых, пересекающихся в точках M и N. Доказать, что
![]()
4. Доказать, что для всякого треугольника АВС выполняются неравенства:
![]()
5. Доказать, что для любого четырехугольника со сторонами а1, а2, а3, а4 имеет место неравенство:
![]()
6. Даны треугольник АВС и точка М. Доказать, что ![]() , где
, где ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
7. Доказать, что для каждого треугольника АВС выполняется неравенство ![]() , где R – радиус описанной окружности, а r – радиус вписанной окружности.
, где R – радиус описанной окружности, а r – радиус вписанной окружности.
8. Доказать, что если угол С треугольника АВС тупой, то ![]() .
.
9. Даны четыре точки A, B, С, D. Доказать, что
![]()
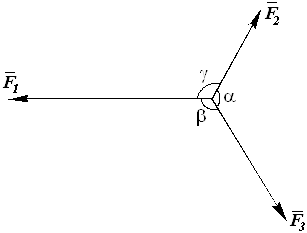 |
10. Дана плоская уравновешенная система сил
Рис. 3.46. Заданная плоская система сил.
Доказать, что ![]() .
.
11. Даны прямые, расположенные в пространстве так (рис. 3.47), что
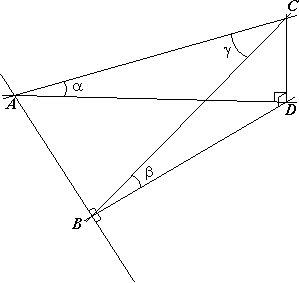
Рис. 3.47. Взаимное расположение в пространстве
заданных прямых
![]() Пользуясь векторной алгеброй, доказать, что
Пользуясь векторной алгеброй, доказать, что
![]() .
.
Найдите некоторые возможные области применения этой формулы на практике.
| < Предыдущая | Следующая > |
|---|