В разделе 1 было получено уравнение плоскости проходящей через точку М0(x0,y0,z0) и с вектором нормали  , где A2+B2+C2>0:
, где A2+B2+C2>0:
A(x – x0) + B(y – y0) + C(z – z0)=0. (*)
Рассмотрим теперь другие способы задания плоскости в пространстве.
Задача 1. Написать уравнение плоскости π, проходящей через три заданные точки М1(x1,y1,z1), М2(x2,y2,z2) и М3(x3,y3,z3) (рис. 5).

Рис. 5
Решение: Чтобы написать уравнение искомой плоскости, достаточно знать координаты какой-либо точки на плоскости и координаты вектора нормали  (уравнение (*). Точкой на плоскости может быть любая из заданных точек М1, М2 или М3, а вектором нормали может быть векторное произведение векторов [
(уравнение (*). Точкой на плоскости может быть любая из заданных точек М1, М2 или М3, а вектором нормали может быть векторное произведение векторов [ ].
].
Поставленную задачу можно решить другим способом. Пусть М(x, y,z) - текущая точка на плоскости π. Тогда векторы  =(x-x1,y-y1,z-z1),
=(x-x1,y-y1,z-z1),  =(x2-x1,y2-y1,z2-z1) и
=(x2-x1,y2-y1,z2-z1) и  =(x3-x1,y3-y1,z3-z1) лежат на плоскости π (компланарны). Условие компланарности этих векторов (равенство нулю их смешанного произведения) задает уравнение искомой плоскости π:
=(x3-x1,y3-y1,z3-z1) лежат на плоскости π (компланарны). Условие компланарности этих векторов (равенство нулю их смешанного произведения) задает уравнение искомой плоскости π:
 . (21)
. (21)
Пример. Написать уравнение плоскости, проходящей через точки М1(1,1,1), М2(3,2,-1) и М3(4,1,0).
Для решения задачи воспользуемся вторым способом. Уравнение плоскости запишем в виде (21)
 .
.
Разложив определитель по первой строке, получим
 Или
Или
 – уравнение искомой плоскости с
– уравнение искомой плоскости с  .
.
Заметим, что векторное произведение векторов =(2,1,–2) и =(3,0,–1) коллинеарно вектору нормали .
Действительно,
 .
.
Задача 2. Написать уравнение плоскости π, проходящей через точку М0(x0,y0,z0) и прямую L (рис. 6):  , если точка M0 не лежит на прямой L (иначе плоскость однозначно не определена). Точка М1(x1,y1,z1) принадлежит L, вектор
, если точка M0 не лежит на прямой L (иначе плоскость однозначно не определена). Точка М1(x1,y1,z1) принадлежит L, вектор  – направляющий вектор.
– направляющий вектор.

Рис. 6
Решение: Заданной точкой в уравнении (*) может быть любая из точек М1 или М0. Вектором нормали может служить векторное произведение векторов  и :
и :
 =(A, B,C).
=(A, B,C).
Задача 3. Написать уравнение плоскости, проходящей через две параллельные прямые.
 и
и 
Т. M1 (x1,y1,z1) ,
,
Т. M2 (x2,y2,z2)  ,
,
Вектор – направляющий вектор прямых L1,L2 (рис. 7).
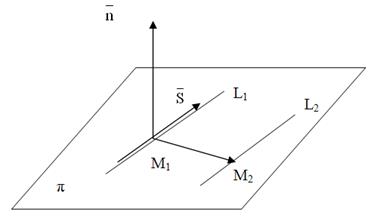
Рис. 7
Вновь используем уравнение (*).
Точка на плоскости – любая из точек М1 или М2; вектором нормали =(A, B,C) может быть векторное произведение [, ].
].
Задача 4. Доказать, что две прямые L1, L2 лежат в одной плоскости (пересекаются) и составить уравнение этой плоскости.
Решение задачи рассмотрим на примере.
Пусть  и
и  .
.
1. Проверим, лежат ли прямые L1 и L2 в одной плоскости. Для этого убедимся, что векторы  ,
,  и компланарны.
и компланарны.
Запишем параметрически заданную прямую L2 в каноническом виде
 ,
,
здесь М2(7,2,1) – точка на прямой L2,  – ее направляющий вектор.
– ее направляющий вектор.
На прямой L1: М1(1,-2,5);  . Вектор =(6,4,–4) (рис. 8).
. Вектор =(6,4,–4) (рис. 8).
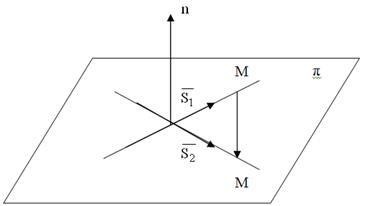
Рис. 8
Условием компланарности является равенство нулю смешанного произведения
 ,
,
Т. к. в полученном определителе две строки совпадают (при вычислении определителя общие множители первой строки и последнего столбца вынесены за знак определителя).
Итак, мы убедились, что прямые L1 и L2 пересекаются.
Точка плоскости π – любая из точек М1, М2 (возьмем, например, точку М1(1,–2,5)).
Вектор нормали  =(А, B,C)= [
=(А, B,C)= [ ]=
]= = – 2
= – 2 +16
+16 +13
+13 .
.
Уравнение искомой плоскости π:
– 2(x – 1) + 16(y + 2) + 13(z – 5) = 0, или
2x – 16y – 13z + 31 = 0.
Задача 5. Определить взаимное расположение прямой L, заданной как пересечение двух непараллельных плоскостей:
L:
И плоскости π: A3x+B3y+C3z+D3=0.
Решение: Возможны следующие случаи:
А) прямая L и плоскость π не пересекаются (прямая параллельна плоскости и не имеет общих точек с плоскостью);
Б) прямая L пересекается с плоскостью в единственной точке;
В) прямая L лежит в плоскости – бесчисленное множество общих точек.
Эти задачи фактически были рассмотрены в разделе 2, когда прямая задавалась параметрическими или каноническими уравнениями.
Вообще говоря, нет надобности переходить от общего уравнения прямой к каноническому. Алгебраически задача сводится к исследованию и решению (если это возможно) системы уравнений
 . (22)
. (22)
Решение этой системы определяет координаты общих точек прямой и плоскости.
Воспользуемся методом Крамера. Обозначим определитель системы (22)
А определитель Δ1, Δ2, Δ3, полученные из Δ с помощью столбца свободных членов, соответственно:
 .
.
Если определитель  , то система (22) имеет единственное решение, и оно определяется по формулам Крамера:
, то система (22) имеет единственное решение, и оно определяется по формулам Крамера:
 ,
,
Имеет место случай (б).
Если определитель  , а хотя бы один из определителей Δ1, Δ2 или Δ3 отличен от нуля, система (22) не имеет решения (не совместна). Геометрически это означает, что прямая и плоскость не имеют общих точек (параллельны) – случай (а).
, а хотя бы один из определителей Δ1, Δ2 или Δ3 отличен от нуля, система (22) не имеет решения (не совместна). Геометрически это означает, что прямая и плоскость не имеют общих точек (параллельны) – случай (а).
Если же все определители Δ =Δ1=Δ2=Δ3=0, то система (22) имеет бесчисленное множество решений. Прямая L целиком лежит на плоскости π (случай в)).
Задача 6. Определить точку Q, симметричную точке M0(x0,y0,z0), относительно плоскости
π: Ax+By+Cz+D=0
Решение. Запишем алгоритм решения задачи.
1. Составим уравнение прямой L, проходящей через точку M0(x0,y0,z0) и перпендикулярной плоскости π. Направляющим вектором  этой прямой послужит вектор нормали
этой прямой послужит вектор нормали 
 .
.
2. Найдём точку пересечения M1(x1,y1,z1) прямой L и плоскости π (см. раздел 2).
3. Точка M1 является серединой отрезка M0Q, и координаты точек M0, M1 и Q связаны формулами: x1= ,y1=
,y1= ,z1=
,z1= , откуда найдем координаты точки Q(x0,y0,z0)
, откуда найдем координаты точки Q(x0,y0,z0)
(рис. 9):
XQ=2x1 – x0, yQ=2y1 – y0, zQ=2z1 – z0.

Рис. 9
Аналогично решается и следующая задача.
Задача 7. Найти точку Q, симметричную точке M0(x0,y0,z0) относительно прямой
 .
.
Решение.
1. Составим уравнение плоскости, проходящей через точку M0(x0,y0,z0) перпендикулярно прямой L. Вектором нормали к этой плоскости  (A, B,C) возьмем направляющий вектор =(l, m,n) прямой L.
(A, B,C) возьмем направляющий вектор =(l, m,n) прямой L.
π: l(x – x0) + m(y – y0) + n(z – z0)=0.
2. Найдем точку пересечения M1(x1,y1,z1) прямой L и плоскости π (см. раздел 2).
3. Точка M1 – середина отрезка M0Q, координаты точки Q определяются так же, как и в задаче 6.