2. Преобразование прямоугольной системы координат
При решении задач иногда выгодно, вместо данной прямоугольной системы координат ![]() , выбрать другую прямоугольную систему координат
, выбрать другую прямоугольную систему координат ![]() , определенным образом ориентированную относительно первой.
, определенным образом ориентированную относительно первой.
Рассмотрим сначала простейший случай (см. рис.1), когда оси «новой системы координат» ![]() параллельны соответствующим осям « старой системы координат»
параллельны соответствующим осям « старой системы координат» ![]() и имеют одинаковые направления с ними (параллельный перенос системы координат).
и имеют одинаковые направления с ними (параллельный перенос системы координат).
 Пусть начало новой системы координат
Пусть начало новой системы координат ![]() имеет координаты
имеет координаты ![]() в старой системе координат. Точка
в старой системе координат. Точка ![]() плоскости со «старыми координатами»
плоскости со «старыми координатами» ![]() будет иметь некоторые «новые координаты»
будет иметь некоторые «новые координаты» ![]() . Из рис.1 получаем
. Из рис.1 получаем
|
 , (1) то есть новые координаты точки равны ее старым координатам минус старые координаты нового начала.
, (1) то есть новые координаты точки равны ее старым координатам минус старые координаты нового начала.
Обратно из (1) находим
 (2)
(2)
|
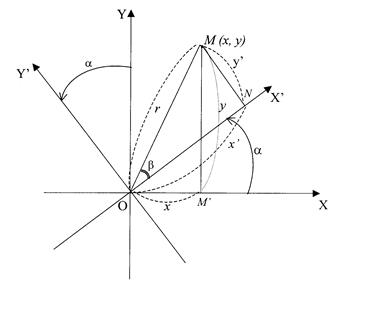 Пусть теперь «новая система» координат
Пусть теперь «новая система» координат Обозначим через ![]() угол, образованный радиусом-вектором
угол, образованный радиусом-вектором ![]() точки
точки ![]() с осью
с осью ![]() ; тогда отрезок
; тогда отрезок ![]() , с учетом знака
, с учетом знака ![]() , будет составлять с осью
, будет составлять с осью ![]() угол
угол ![]() . Отсюда на основании формул при любом расположении точки
. Отсюда на основании формул при любом расположении точки ![]() имеем:
имеем:
 (3)
(3)
Так как новые координаты точки ![]() есть
есть
![]() , (4)
, (4)
То из формул (3) получаем
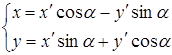 (5)
(5)
Формулы (5) выражают старые координаты ![]() и
и ![]() точки
точки ![]() через ее новые координаты
через ее новые координаты![]() и
и ![]() . Чтобы выразить новые координаты
. Чтобы выразить новые координаты ![]() и
и ![]() через старые
через старые ![]() и
и ![]() , достаточно разрешить систему (5) относительно
, достаточно разрешить систему (5) относительно ![]() и
и ![]() . Но можно поступить проще: а именно, принять систему
. Но можно поступить проще: а именно, принять систему ![]() за «старую», а систему XOY за «новую». Тогда, учитывая, что вторая система повернута относительно первой на угол
за «старую», а систему XOY за «новую». Тогда, учитывая, что вторая система повернута относительно первой на угол ![]() , заменяя в формулах (5)
, заменяя в формулах (5) ![]() и
и ![]() Соответственно на
Соответственно на ![]() и
и ![]() , и обратно принимая во внимание, что
, и обратно принимая во внимание, что ![]() , будем иметь
, будем иметь
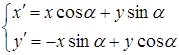
![]() (6)
(6)
Наконец, в общем случае, когда новое начало координат есть точка и ось ![]() образует с осью
образует с осью ![]() угол
угол ![]() , соединяя формулы (2) и (5), находим
, соединяя формулы (2) и (5), находим
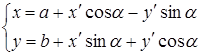 (7)
(7)
Аналогично, из формул (1) и (6) получим
 (8)
(8)
| < Предыдущая | Следующая > |
|---|