75. Различные уравнения плоскости
Пусть в пространстве R 3 Задана прямоугольная система координат Oxyz.
Определение 1. Нормальным вектором плоскости A называется любой ненулевой вектор N Перпендикулярный плоскости A.
Пусть N = (A,B,C) ≠ 0, - нормальный вектор плоскости a, M0(X0,Y0,Z0)- точка, принадлежащая плоскости a. Пусть M(X,Y,Z), произвольная точка пространства,
![]()
![]() .
.
Тогда точка M принадлежит плоскости a тогда и только тогда, когда векторы ![]() и N Ортогональны. Два вектора ортогональны тогда и только тогда, когда их скалярное произведение равно нулю, Последнее в ортонормированном базисе можно записать в виде:
и N Ортогональны. Два вектора ортогональны тогда и только тогда, когда их скалярное произведение равно нулю, Последнее в ортонормированном базисе можно записать в виде:
A(X - X0) + B(Y - Y0) +C(Z - Z0) = 0 . (1)
Таким образом, получаем уравнение плоскости, Проходящей через точку и перпендикулярной вектору N = (A,B,C) ≠ 0.
Рассмотрим произвольное уравнение первого порядка
Ax + By + Cz + D = 0, (2)
Где коэффициенты одновременно не равны нулю, т. е. A2+ B2+ C2 ≠ 0.
Теорема 1. Любую плоскость в произвольной аффинной системе координат можно задать уравнением (1) первого порядка и обратно любое уравнение (1) первого порядка в аффинной системе координат определяет плоскость.
Доказательство. Достаточно доказать теорему для прямоугольной системы координат. Любую плоскость в прямоугольной системе координат можно задать ее нормальным вектором N = (A,B,C) ≠ 0 И точкой M0(X0,Y0,Z0), принадлежащей плоскости. Уравнение этой плоскости выведено в §2.2 и имеет вид:
A(X - X0) + B(Y - Y0) +C(Z - Z0) = 0.
Отсюда получаем
Ax + By +Cz +(-Ax0 - By0 - Cz0)= 0,
Ax + By +Cz + D= 0,
Где D = -Ax0 - By0 - Cz0. Так (A,B,C) ≠ 0, то A2+ B2+ C2 ≠ 0 и любая плоскость есть поверхность первого порядка.
Обратно, пусть некоторая поверхность в пространстве определена уравнением (1). Так как не все коэффициенты равны нулю, то уравнение (1) имеет решение (X0,Y0,Z0). Тогда
Ax0 + By0 + Cz0 + D = 0, (3)
И точка M0(X0,Y0,Z0) принадлежит поверхности. Вычитая почленно из уравнения (1) равенство (2), получим уравнение
A(X - X0) + B(Y - Y0) +C(Z - Z0) = 0,
Равносильное уравнению (1). Это уравнение в силу §2.2, определяет плоскость, проходящую через точку M0(X0,Y0,Z0), перпендикулярную вектору N = (A,B,C).
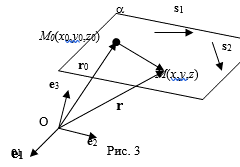
Определение 2. Направляющими векторами плоскости A называется пара неколлинеарных векторов S1 И S2 Параллельных плоскости A.
Пусть S1 = (M1,K1,L1), S2 = (M2,K2,L2) - направляющие вектора плоскости a, M0(X0,Y0,Z0)- точка, принадлежащая плоскости a. Пусть M(X,Y,Z), произвольная точка пространства,
![]()
![]() .
.
Тогда точка M принадлежит плоскости a тогда и только тогда, когда векторы ![]() , S1 и S2 компланарны. Три вектора компланарны тогда и только тогда, когда определитель, составленный из координат этих векторов равен нулю. Таким образом, получаем уравнение плоскости по Двум направляющим векторам и точке, принадлежащей плоскости
, S1 и S2 компланарны. Три вектора компланарны тогда и только тогда, когда определитель, составленный из координат этих векторов равен нулю. Таким образом, получаем уравнение плоскости по Двум направляющим векторам и точке, принадлежащей плоскости
 . (4)
. (4)
Пример 1. Найдем уравнение плоскости с направляющими векторами S1 = (B,-A,0), S2 = (C,0,-A), где A ≠ 0. Так как векторы S1 и S2 неколлинеарны, то формуле (4) находим уравнение этой плоскости:
 .
.
Отсюда находим
![]() .
.
Сократим на A ≠ 0 и получаем уравнение
![]() . (5)
. (5)
Рассмотрим радиус вектора RO = ![]() и R =
и R =![]() . Точка M принадлежит плоскости a тогда и только тогда, когда векторы
. Точка M принадлежит плоскости a тогда и только тогда, когда векторы ![]() = R - RO, S1 и S2 компланарны. Так как векторы S1 и S2 неколлинеарны, то последнее равносильно тому, что вектор R - RO линейная комбинация векторов S1 и S2, т. е. R - RO = US1 +VS2, где U, V - действительные числа.
= R - RO, S1 и S2 компланарны. Так как векторы S1 и S2 неколлинеарны, то последнее равносильно тому, что вектор R - RO линейная комбинация векторов S1 и S2, т. е. R - RO = US1 +VS2, где U, V - действительные числа.
Отсюда получаем так называемое Векторно-параметрическое уравнение Плоскости.
R = RO + US1 +VS2, (6)
Где U, V - произвольные действительные параметры.
Так как R =![]() = (X,Y,Z), RO =
= (X,Y,Z), RO = ![]() = (X0,Y0,Z0), то запишем это уравнение в координатной форме. Получим Параметрические уравнения плоскости:
= (X0,Y0,Z0), то запишем это уравнение в координатной форме. Получим Параметрические уравнения плоскости:
 (7)
(7)
Где U, V - произвольные действительные параметры, S1 = (M1,K1,L1), S1 = (M2,K2,L2) - направляющие вектора плоскости, M0(X0,Y0,Z0)- точка, принадлежащая плоскости.
Пусть даны три точки M1(X1,Y1,Z1), M2(X2,Y2,Z2), M3(X3,Y3,Z3) плоскости, которые не принадлежат одной прямой. Тогда векторы ![]() ,
, ![]()
являются направляющими векторами плоскости a. Применяя формулу (4) получим Уравнение плоскости, проходящей через три данные точки:
 . (8)
. (8)
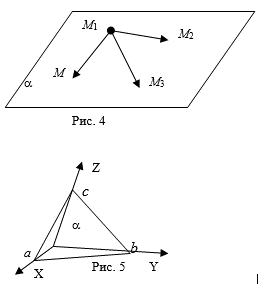
Пусть плоскость не проходит через начало координат и пересекает оси Ox, Oy, Oz Соответственно в точках M1(A,0,0), M2(0,B,0), M3(0,0,c). По формулу (8) находим уравнение плоскости, проходящей через эти три точки
 .
.
Вычислим этот определитель и преобразуем полученное уравнение к более простому виду
(X - a)Bc + Yac + Zab = 0,
Xbc + Yac + Zab = Abc,
![]() . (9)
. (9)
Уравнение (5) называется Уравнением плоскости в отрезках на осях.
.Замечание 1. Уравнение (1) называется Общим уравнением плоскости. Если плоскость a задается общим уравнением (1) в прямоугольной системе координат, то N = (A,B,C) - нормальный вектор плоскости a.
Если плоскость a задается общим уравнением (1) в произвольной аффинной системе координат и A ≠ 0, то S1 = (B,-A,0), S2 = (C,0,-A) направляющие вектора плоскости a.
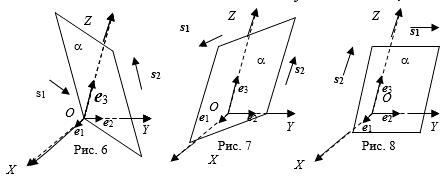
Рассмотрим Частные случаи уравнения (1).
1. Пусть D = 0. Тогда уравнение (1) принимает вид: Ax + By + Cz = 0 и плоскость, определяемая этим уравнением, проходит через начало координат (см. Рис. 6).
2. Пусть С = 0, A ≠ 0. Тогда уравнение (1) принимает вид: Ax + By + D = 0. Рассмотрим направляющие вектора S1 = (B,-A,0) и S2 = (0,0,-A) этой плоскости. Так как базисный вектор Е3 = (0,0,1) оси Oz. коллинеарен вектору S2, то плоскость a, определяемая этим уравнением, параллельна оси Oz (см. Рис. 7).
3. Пусть B=0, С = 0, A ≠ 0. Тогда уравнение (1) принимает вид: Ax + D = 0. Рассмотрим направляющие вектора S1 = (0,-A,0) и S2 = (0,0,-A) этой плоскости. Так как базисные векторы е2 = (0,1,0), Е3 = (0,0,1) .коллинеарны соответственно векторам вектору S1, S2, то плоскость a, определяемая этим уравнением, параллельна координатной плоскости Ozy (см. Рис. 8).
| < Предыдущая | Следующая > |
|---|