27. Метод Полака–Рибьера
Этот метод сопряженных градиентов представлен американскими математиками Э. Полаком и Д. Рибьером в 1969 году. Для его обоснования применим первое из свойств (3.19) в виде ![]() ,
, ![]() . Из этой формулы следует, что
. Из этой формулы следует, что
![]() .
.
Поэтому формулу Флетчера – Ривса (3.23) для вычисления коэффициента ![]() можно представить в виде:
можно представить в виде:
![]() ,
, ![]() . (3.27)
. (3.27)
Эта формула называется Формулой Полака – Рибьера, а онованный на ее использовании метод называется Методом Полака – Рибьера. В этом методе задается начальная точка ![]() , в ней вычисляется значение градиента
, в ней вычисляется значение градиента ![]() . В направлении антиградиента производится одномерный поиск и находится следующая точка:
. В направлении антиградиента производится одномерный поиск и находится следующая точка:
![]() ,
, ![]() ,
, ![]() . (3.28)
. (3.28)
Последующие итерации основаны на вычислении градиента ![]() , формулах методов спуска (1.16), методов сопряженных градиентов (3.18) и формулы Полака – Рибьера (3.27):
, формулах методов спуска (1.16), методов сопряженных градиентов (3.18) и формулы Полака – Рибьера (3.27):
![]() ,
, ![]() ,
, ![]() , (3.29)
, (3.29)
![]() ,
, ![]() . (3.30)
. (3.30)
Итерации продолжаются до тех пор, пока выполняется условие
![]() ,
,
Где ![]() – допустимая погрешность. Формулы метода Полака – Рибьера (3.28)–(3.30) отличаются от соответствующих формул метода Флетчера – Ривса (3.24)–(3.26) только формулой вычисления коэффициента
– допустимая погрешность. Формулы метода Полака – Рибьера (3.28)–(3.30) отличаются от соответствующих формул метода Флетчера – Ривса (3.24)–(3.26) только формулой вычисления коэффициента ![]() . По формулам (3.28)–(3.30) составим алгоритм метода Полака – Рибьера.
. По формулам (3.28)–(3.30) составим алгоритм метода Полака – Рибьера.
Алгоритм метода Полака – Рибьера.
Входные параметры: ![]() – начальная точка поиска,
– начальная точка поиска, ![]() – процедура вычисления функции,
– процедура вычисления функции, ![]() – допустимая погрешность.
– допустимая погрешность.
Выходной параметр ![]() – конечная точка поиска.
– конечная точка поиска.
1. Вычислить ![]() и положить
и положить ![]() .
.
2. Вычислить ![]() ,
, ![]() .
.
3. Положить ![]() ,
, ![]() .
.
4. Вычислить ![]() ,
, ![]() .
.
5. Положить ![]() .
.
6. Если ![]() , то перейти к шагу 2.
, то перейти к шагу 2.
7. Остановиться.
Этот алгоритм отличается от алгоритма метода Флетчера – Ривса только вычислением параметра ![]() на шаге 4.
на шаге 4.
Пример 3.6. Для вычисления точки минимума квадратичной функции (1.3) с допустимой погрешностью 10–3 метод Полака – Рибьера затратил 3 итерации 19 вычислений функции, причем за две итерации найдено значение функции 1,8∙10–14. При этом траектория минимизации такая же, как и на рис. 3.5 для метода Флетчера – Ривса.
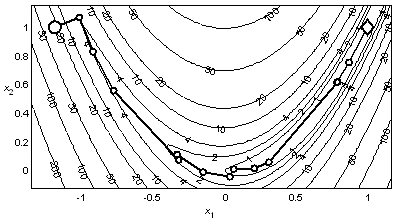
Пример 3.7. На рис. 3.8 представлена траектория минимизации функции Розенброка методом Полака – Рибьера. Вычисление точки минимума с допустимой погрешностью 10–3 потребовало 17 итераций и 266 вычислений функции.
|
|
|
Рис. 3.8. Минимизация функции Розенброка методом Полака – Рибьера |
Если все вычисления, включая одномерный поиск, проводятся с абсолютной точностью, то при минимизации квадратичной положительно определенной целевой функции методы Флетчера – Ривса и Полака – Рибьера производят одинаковые последовательности точек поиска, то есть траектории поиска в обоих методах совпадают.
Однако при минимизации целевых функций общего вида в результате большого количества вычислительных экспериментов установлено, что метод Полака – Рибьера гораздо эффективнее метода Флетчера – Ривса. Эвристическое объяснение этого факта состоит в том, что в связи с отличием целевой функции от квадратичной функции и неточностью одномерного поиска вырабатываемые методом Полака – Рибьера направления все с меньшей точностью удовлетворяют условиям сопряженности. В результате вновь построенный по формуле (3.29) вектор направления ![]() становится почти ортогональным градиенту
становится почти ортогональным градиенту ![]() и метод может временно «застревать». В таком случае имеем
и метод может временно «застревать». В таком случае имеем ![]() , поэтому по формуле Полака – Рибьера (3.27) получим значение
, поэтому по формуле Полака – Рибьера (3.27) получим значение ![]() , близкое к нулю. Но тогда следующий вектор направления
, близкое к нулю. Но тогда следующий вектор направления ![]() , построенный согласно (3.29), оказывается близким к
, построенный согласно (3.29), оказывается близким к ![]() , и автоматически происходит рестарт метода. Формула Флетчера – Ривса (3.23) таким свойством не обладает, поэтому в методе Флетчера – Ривса применяют принудительные рестарты. Метод Полака – Рибьера также может применяться с рестартами.
, и автоматически происходит рестарт метода. Формула Флетчера – Ривса (3.23) таким свойством не обладает, поэтому в методе Флетчера – Ривса применяют принудительные рестарты. Метод Полака – Рибьера также может применяться с рестартами.
Итак, метод Полака – Рибьера эффективен даже при наличии ошибок вычислений и обладает малой чувствительностью к ошибкам округления при проведении одномерных поисков. Ему принадлежит ведущая роль при решении задач безусловной минимизации большой размерности.
В настоящее время построено и применяется много других вариантов методов сопряженных градиентов. В частности, кроме формулы (3.27) известны формулы Хестенса – Штифеля, Диксона и Даи – Юана:
![]() ,
, ![]() ,
, ![]() .
.
Все эти формулы производят одинаковые направления поиска, когда используются для минимизации квадратичной функции с положительно определенной матрицей Гессе и точным одномерным поиском. Однако для нелинейной функции общего вида с неточным одномерным поиском их действия значительно отличаются.
| < Предыдущая | Следующая > |
|---|