68. Рассмотрим некоторые примеры линейных операторов
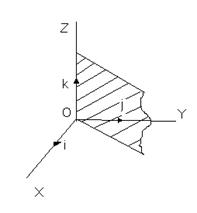
Оператор Проектирования. Пусть требуется найти матрицу линейного оператора, осуществляющего проектирование трехмерного пространства на координатную ось Е1 в базисе Е1, Е2, Е3. Матрица линейного оператора – это матрица, в столбцах которой должны стоять образы базисных векторов Е1 = (1,0,0), Е2 = (0,1,0), Е3 = (0,0,1). Эти образы, очевидно, есть: Ае1 = (1,0,0)
Ае2 = (0,0,0)
Ае3 = (0,0,0)
Следовательно, в базисе Е1, Е2, Е3 матрица искомого линейного оператора будет иметь вид: 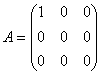
Найдем ядро этого оператора. Согласно определению ядро – это множество векторов Х, для которых АХ = 0. Или
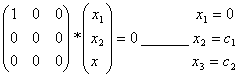
Т. е. ядро оператора составляет множество векторов, лежащих в плоскости Е1, Е2. Размерность ядра равна n – rangA = 2.
Множество образов этого оператора – это, очевидно, множество векторов, коллинеарных Е1. Размерность пространства образов равна рангу линейного оператора и равна 1, что меньше размерности пространства прообразов. Т. е. оператор А – вырожденный. Матрица А тоже вырождена.
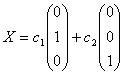
Еще пример: найти матрицу линейного оператора, осуществляющего в пространстве V3 (базис I, J, K) линейное преобразование – симметрию относительно начала координат.
Имеем: Ai = - i
Aj = - j
Ak = - k
Т. е. искомая матрица 
Рассмотрим линейное преобразование – Симметрию относительно плоскости Y = X.
Ai = j (0,1,0)
Aj = I (1,0,0)
Ak = K (0,0,1)
Матрица оператора будет:
Ai Aj Ak
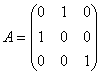
 Еще пример – уже знакомая матрица, связывающая координаты вектора при повороте осей координат. Назовем оператор, осуществляющий поворот осей координат, - оператор поворота. Допустим, осуществляется поворот на угол j:
Еще пример – уже знакомая матрица, связывающая координаты вектора при повороте осей координат. Назовем оператор, осуществляющий поворот осей координат, - оператор поворота. Допустим, осуществляется поворот на угол j:
Ai ’ = cosjI + sinjJ
Aj ’ = - sinjI + cosjJ
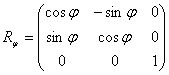
Матрица оператора поворота:
![]()
Ai ‘ Aj ‘
Вспомним формулы преобразования координат точки при смене базиса – замена координат на плоскости при смене базиса:
![]()
 Эти формулы можно рассматривать двояко. Ранее мы рассматривали эти формулы так, что точка стоит на месте, поворачивается координатная система. Но можно рассматривать и так, что координатная система остается прежней, а перемещается точка из положения М* в положение М. Координаты точки М и М* определены в той же координатной системе.
Эти формулы можно рассматривать двояко. Ранее мы рассматривали эти формулы так, что точка стоит на месте, поворачивается координатная система. Но можно рассматривать и так, что координатная система остается прежней, а перемещается точка из положения М* в положение М. Координаты точки М и М* определены в той же координатной системе.
 Все сказанное позволяет подойти к следующей задаче, которую приходится решать программистам, занимающимся графикой на ЭВМ. Пусть необходимо на экране ЭВМ осуществить поворот некоторой плоской фигуры (например треугольника) относительно точки О’ с координатами (a, b) на некоторый угол j. Поворот координат описывается формулами:
Все сказанное позволяет подойти к следующей задаче, которую приходится решать программистам, занимающимся графикой на ЭВМ. Пусть необходимо на экране ЭВМ осуществить поворот некоторой плоской фигуры (например треугольника) относительно точки О’ с координатами (a, b) на некоторый угол j. Поворот координат описывается формулами:
Параллельный перенос обеспечивает соотношения:

Для того, чтобы решить такую задачу, обычно применяют искусственный прием: вводят так зазываемые “однородные” координаты точки на плоскости XOY: (x, y, 1). Тогда матрица, осуществляющая параллельный перенос, может быть записана:
Действительно:
А матрица поворота:
Рассматриваемая задача может быть решена в три шага:
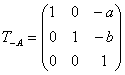
1й шаг: параллельный перенос на вектор А(-а, - b) для совмещения центра поворота с началом координат:
2й шаг: поворот на угол j:
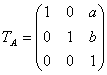
3й шаг: параллельный перенос на вектор А(а, b) для возвращения центра поворота в прежнее положение:
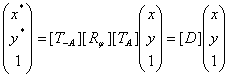
Искомое линейное преобразование в матричном виде будет выглядеть:
 (**)
(**)
Где
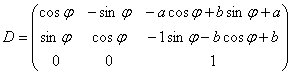
По формуле (**) можно пересчитать координаты любой точки плоской фигуры, а затем построить ее на экране, осуществив тем самым ее поворот.
| < Предыдущая | Следующая > |
|---|