29. Метод потенциалов решения транспортной задачи
Для транспортной задачи (ТЗ), как и для любой ЗЛП, существует двойственная к ней задача.
Исходная задача:
 ; (6.6)
; (6.6)
 ; (6.7)
; (6.7)
 ; (6.8)
; (6.8)
![]() . (6.9)
. (6.9)
Обозначим двойственные переменные для каждого ограничения вида (6.7) через Ui (i = 1,..., m) и вида (6.8) – Vj (j = 1,..., n), тогда двойственная задача имеет вид
 ; (6.10)
; (6.10)
![]() . (6.11)
. (6.11)
Переменные задачи, двойственной к транспортнoй, Ui и Vj называют потенциалами.
Теорема 6.3. Для оптимальности плана X = (Xij)m*n ТЗ необходимо и достаточно существования чисел (потенциалов) V1, V2,..., Vn и U1, U2,..., Um, таких, что:
![]() для i = 1,..., m, j = 1,..., n;
для i = 1,..., m, j = 1,..., n;
![]() , если Xij > 0.
, если Xij > 0.
Из теоремы следует: для того чтобы опорный план был оптимальным, необходимо выполнение следующих условий:
А) для каждой занятой клетки (отличного от нуля элемента матрицы Х) сумма потенциалов должна быть равна стоимости перевозки единицы груза
![]() ; (6.12)
; (6.12)
Б) для каждой незанятой клетки (Xij = 0) сумма потенциалов должна быть меньше или равна стоимости перевозки единицы груза
![]() . (6.13)
. (6.13)
Таким образом, для проверки плана на оптимальность необходимо сначала построить систему потенциалов. Для построения системы потенциалов используем условие
![]() , Xij > 0.
, Xij > 0.
Систему потенциалов можно построить только для невырожденного опорного плана. Такой план содержит m + n – 1 занятых клеток, поэтому для него можно составить систему из m + n – 1 линейно-независимых уравнений вида (6.12) с неизвестными Ui и Vj. Уравнений на одно меньше, чем переменных, поэтому система является неопределенной и одному неизвестному (обычно Ui) придают нулевое значение. После этого остальные потенциалы определяются однозначно.
Проверка выполнения условия оптимальности для незанятых клеток
Просматриваем строки и для каждой незанятой клетки проверяем выполнения условия (6.13), т. е. суммируем потенциалы тех строк и столбцов, на пересечении которых стоит незанятая клетка. Если для всех незанятых клеток Ui + Vj ≤ Cij, то по теореме (6.3) проверяемый план является оптимальным. Если для некоторых клеток Ui + Vj > Cij, то план является неоптимальным. Тогда для каждой клетки, в которой не выполняется условие оптимальности, находим величину (Ui + Vj) – Cij > 0.
Выбор клетки, в которую необходимо поместить перевозку
Загрузке подлежит в первую очередь клетка, которой соответствует
Max((Ui + Vj) – Cij).
Построение цикла и определение величины перераспределения груза
Для определения количества единиц груза, подлежащих перераспределению, отмечаем знаком «+» незанятую клетку, которую надо загрузить. Это означает, что клетка присоединяется к занятым клеткам. Занятых клеток стало m + n, поэтому появляется цикл, все вершины которого за исключением клетки, отмеченной знаком «+», находятся в занятых клетках, причем этот цикл единственный. Отыскиваем цикл и, начиная движение от клетки, отмеченной знаком «+», поочередно проставляем знаки «–» и «+». Затем находим ![]() = min Xij, где Xij – перевозки, стоящие в вершинах цикла, отмеченных знаком «–». Величина
= min Xij, где Xij – перевозки, стоящие в вершинах цикла, отмеченных знаком «–». Величина ![]() определяет, сколько единиц груза можно перераспределить по найденному циклу. Значение
определяет, сколько единиц груза можно перераспределить по найденному циклу. Значение ![]() записываем в незанятую клетку, отмеченную знаком «+». Двигаясь по циклу, вычитаем
записываем в незанятую клетку, отмеченную знаком «+». Двигаясь по циклу, вычитаем ![]() из объемов перевозок, расположенных в клетках, которые отмечены знаком «–», и прибавляем к объемам перевозок, находящихся в клетках, отмеченных знаком «+». Если
из объемов перевозок, расположенных в клетках, которые отмечены знаком «–», и прибавляем к объемам перевозок, находящихся в клетках, отмеченных знаком «+». Если ![]() соответствует несколько минимальных перевозок, то при вычитании оставляем в соответствующих клетках нулевые перевозки в таком количестве, чтобы во вновь полученном опорном плане занятых клеток было m + n – 1.
соответствует несколько минимальных перевозок, то при вычитании оставляем в соответствующих клетках нулевые перевозки в таком количестве, чтобы во вновь полученном опорном плане занятых клеток было m + n – 1.
Проверка нового плана на оптимальность
Для проверки на оптимальность опорного плана нужно вновь построить систему потенциалов и проверить выполнение условия оптимальности для каждой незанятой клетки. Если полученный план снова окажется неоптимальным, то следует выполнить вычисления, приведенные в предыдущем пункте. Процесс повторяют до тех пор, пока все незанятые клетки не будут удовлетворять условию (6.13).
Пример 6.1. Решить ТЗ:
 |
5 4 6 3 200
1 10 2 1 300
2 3 3 1 100
150 150 250 50 600
600
Условие баланса выполнено. Следовательно, имеем ТЗ закрытого типа.
Предварительный этап: находим исходный опорный план X° методом «минимального элемента».
Таблица 6.1
|
100 |
100 |
200 | ||
|
150 |
150 |
300 | ||
|
50 |
50 |
100 | ||
|
150 |
150 |
250 |
50 |
Число занятых клеток равно 6 и совпадает с рангом матрицы ограничений ТЗ:
R = m + n – 1 = 3 + 4 – 1 = 6.
Итерация 1. Для проверки полученного опорного плана на оптимальность находим систему потенциалов для занятых клеток (xij > 0).
Для этого, например, полагаем U1 = 0 (записываем U1 = 0 слева в табл. 6.2).
Таблица 6.2
|
Vj Ui |
V1 = 5 |
V2 = 4 |
V3 = 6 |
V4 = 2 | |||||
|
|
5 |
100+ |
100– |
2 |
200 | ||||
|
U2 = –4 |
150– |
0 |
150+ |
–2 |
300 | ||||
|
U3 = –1 |
4 |
50– |
5 |
50 |
100 | ||||
|
150 |
150 |
250 |
50 |
 U1 = 0
U1 = 0Далее, исходя из занятых клеток (1,2) и (1,3), находим V2 = 4 – 0 = 4, V3 = 6 – 0 = 6 (записываем сверху в таблице). На основе базисной клетки (2,3) получаем U2 = 2 – 6 = –4, затем V1 = 1 – (–4) = 5; U3 = 3 – 4 = –1; V4 = 2.
Далее вычисляем сумму потенциалов для каждой из свободных клеток и записываем их в верхнем левом углу. Так как для клеток (3,1) и (3,3) критерий оптимальности не выполняется:
U3 + V1 = 4 > 2,
U3 + V3 = 5 > 3,
То полученный опорный план не оптимальный. Так как
D31 = U3 + V1 – Cij = 2 = D33,
То в любую из клеток, например, в (3,1), проставляем некоторое число ![]() .
.
Для того чтобы не нарушился баланс в 3-й строке, вычитаем ![]() из величины перевозки, стоящей в клетке (3,2), прибавляем к X12 = 100, вычитаем от X13, прибавляем к X23 и вычитаем от X21, т. е. составляем цикл:
из величины перевозки, стоящей в клетке (3,2), прибавляем к X12 = 100, вычитаем от X13, прибавляем к X23 и вычитаем от X21, т. е. составляем цикл:
(3,1) → (3,2) → (1,2) → (1,3) → (2,3) → (2,1) → (3,1).
Знаки «+» и «–» в клетках чередуются.
Заметим, что движение от одной клетки к другой происходит только по занятым, кроме первой, в которую ![]() проставляется. Максимальное значение
проставляется. Максимальное значение ![]() равно наименьшему уменьшаемому:
равно наименьшему уменьшаемому: ![]() = 50. Если
= 50. Если ![]() взять больше, то получаем отрицательную величину в плане перевозок, а если меньше, то нарушается опорность плана.
взять больше, то получаем отрицательную величину в плане перевозок, а если меньше, то нарушается опорность плана.
Новый опорный план приведен в табл. 6.3
Таблица 6.3
|
Vj Ui |
5 |
4 |
6 |
4 | ||||||||||||||||||||
|
|
5 |
150 |
50- |
4 q2 | ||||||||||||||||||||
|
|
100- |
0 |
200+ |
0 | ||||||||||||||||||||
|
–3 |
50+ |
1 |
3 |
50- |
Итерация 2. Проверяем полученный план X(1) на оптимальность. Находим систему потенциалов (они записаны в таблице слева и сверху). Вычисляем сумму потенциалов для свободных клеток (записаны в левом верхнем углу клетки). Так как
U1 + V4 = 4 > 3,
То план X(1) не является оптимальным. Для построения нового опорного плана проставляем величину ![]() в клетку (1,4) и составляем цикл:
в клетку (1,4) и составляем цикл:
(1,4) → (3,4) → (3,1) → (2,1) → (2,3) → (1,3) → (1,4).
Определяем значение ![]() = 50, при этом две клетки (1,3) и (3,4) обращаются в нулевые. Следовательно, план Х(2) будет вырожденным. Для дальнейшего решения необходимо оставить нуль в одной из клеток и считать ее за базисную. Целесообразнее нуль оставить в клетке с меньшей стоимостью перевозок, т. е. в клетке (3,4). Новый опорный план приведен в табл. 6.4.
= 50, при этом две клетки (1,3) и (3,4) обращаются в нулевые. Следовательно, план Х(2) будет вырожденным. Для дальнейшего решения необходимо оставить нуль в одной из клеток и считать ее за базисную. Целесообразнее нуль оставить в клетке с меньшей стоимостью перевозок, т. е. в клетке (3,4). Новый опорный план приведен в табл. 6.4.
Таблица 6.4
|
Vj Ui |
V1=4 |
V2=4 |
V3=5 |
V4=3 |
|
U1 = 0 |
|
4 150 |
5 |
3 50 |
|
U2 = -3 |
50 |
1 |
250 |
0 |
|
U3 = -2 |
100 |
2 |
3 |
1 |
 4
4
Итерация 3. Число занятых клеток равно 6. Находим значения потенциалов и их сумму для свободных клеток. Критерий оптимальности выполняется:
Ui +Vj ≤ Cij для Xij = 0; i = 1, m; j = 1, n,
Поэтому полученный план является оптимальным:
 и F (x*) = 1500.
и F (x*) = 1500.
Пример 6.2. Решить задачу:

Решение. Объем ресурсов: 80 + 60 + 60 = 200 – превышает общие потребности 30 + 70 + + 60 = 160 на 40 ед., следовательно, ТЗ является задачей открытого типа. Вводим дополнительный (балансовый) пункт потребления с объемом потребностей b4 = 40 и полагаем
c14 = c24 = c34 = 0. В результате получаем ТЗ закрытого типа.
Предварительный этап. Находим исходный опорный план ![]() методом «минимального элемента» (табл. 6.5).
методом «минимального элемента» (табл. 6.5).
Таблица 6.5
|
Vj Ui |
7 |
3 |
4 |
2 | ||||||||
|
0 |
7 |
3 |
4 |
4 |
2 |
0 | ||||||
|
10– |
70 | |||||||||||
|
| ||||||||||||
|
–2 |
5 |
1 |
7 |
2 |
8 |
0 | ||||||
|
20+ |
40– | |||||||||||
|
–2 |
5 |
3 |
1 |
8 |
2 |
0 | ||||||
|
60 |
0 |
Данный план является вырожденным, поэтому ставим «0» – перевозку в клетку с минимальным значением cij, но так, чтобы не образовалось замкнутого маршрута (цикла). В нашем примере c14 = c34 = 0, но занять клетку (1,4) нельзя, так как образуется цикл:
(1,4) → (2,4) → (2,1) → (1,1) → (1,4).
Поэтому ставим «0» в клетку (3,4).
Итерация 1. Проверяем план ![]() на оптимальность. Положив
на оптимальность. Положив ![]() , находим потенциалы (см. табл. 6.5). Далее находим сумму потенциалов для свободных клеток (они записаны в левом верхнем углу клетки). Так как
, находим потенциалы (см. табл. 6.5). Далее находим сумму потенциалов для свободных клеток (они записаны в левом верхнем углу клетки). Так как
![]() ;
;
![]() ,
,
То полученный опорный план ![]() неоптимальный. Для клеток (1,4) и (3,1) оценки одинаковы:
неоптимальный. Для клеток (1,4) и (3,1) оценки одинаковы: ![]() и
и ![]() , поэтому выбираем любую, например, (1,4). Проставляем в эту клетку
, поэтому выбираем любую, например, (1,4). Проставляем в эту клетку ![]() и составляем цикл, чередуя знаки «+» и «–»; получим
и составляем цикл, чередуя знаки «+» и «–»; получим ![]() . Новый опорный план представлен в табл. 6.6.
. Новый опорный план представлен в табл. 6.6.
Таблица 6.6
|
Vj Ui |
5 |
3 |
2 |
0 | ||||||||
|
0 |
5 |
7 |
3 |
2 |
4 |
0 | ||||||
|
70 |
10 | |||||||||||
|
0 |
5 |
3 |
7 |
2 |
8 |
0 | ||||||
|
30– |
30+ | |||||||||||
|
0 |
5 |
3 |
3 |
8 |
2 |
0 | ||||||
|
|
60 |
0– |
Итерация 2. Находим систему потенциалов (см. слева и сверху табл. 6.6). Сумма потенциалов для небазисных клеток записана в левом верхнем углу. Критерий оптимальности не выполняется для клетки (3,1):
![]() .
.
Проставим в эту клетку ![]() и составим замкнутую цепочку, в результате получаем
и составим замкнутую цепочку, в результате получаем ![]() . Опорный план
. Опорный план ![]() Представлен в таблице 6.7.
Представлен в таблице 6.7.
Итерация 3. Найдя систему потенциалов, убеждаемся в оптимальности плана ![]() (табл. 6.7).
(табл. 6.7).
Таблица 6.7
|
Vj Ui |
5 |
3 |
4 |
0 | ||||||||
|
0 |
5 |
7 |
3 |
4 |
4 |
0 | ||||||
|
70 |
10 | |||||||||||
|
0 |
5 |
3 |
7 |
4 |
8 |
0 | ||||||
|
30 |
30 | |||||||||||
|
–2 |
3 |
1 |
8 |
2 |
-2 |
0 | ||||||
|
0 |
60 |
Транспортные издержки составляют 480 и ![]() . Так как четвертый потребитель фиктивный, то 10 ед. груза останутся у первого поставщика, 30 ед. – у второго.
. Так как четвертый потребитель фиктивный, то 10 ед. груза останутся у первого поставщика, 30 ед. – у второго.
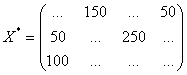
Пример 6.3. Методом потенциалов решите следующую ТЗ:
|
|

Прочерк между пунктами A2 и B2, A3 и B4 означает, что перевозки между указанными пунктами запрещены.
Проверяем условие баланса:
80 + 320 + 150 = 550 = 250 + 100 + 150 + 50.
Для решения задачи полагаем, что стоимости перевозки единицы груза по запрещенным маршрутам равны достаточно большому числу М > 0. Далее эта М-задача решается обычным методом потенциалов, но потенциалы будут зависеть от коэффициента М. Если оптимальный план М-задачи содержит положительные перевозки по запрещенным маршрутам, то исходная ТЗ неразрешима (множество ее планов пусто). В противном случае получаем решение исходной ТЗ.
Предварительный этап. Составляем методом «минимального элемента» исходный опорный план ![]() (табл. 6.8).
(табл. 6.8).
Итерация 1. Вычисляем потенциалы и проверяем план на оптимальность (см. табл. 6.8).
Таблица 6.8
|
Vj Ui |
10 – M |
2 |
1 |
7 – M | ||||||||
|
0 |
10-M |
6 |
2 |
6 |
1 |
7-M |
4 | |||||
|
80 | ||||||||||||
|
M – 2 |
8 |
M |
M-1 |
6 |
5 | |||||||
|
250 |
20– |
|
50 | |||||||||
|
2 |
12-M |
5 |
4 |
3 |
9-M |
M | ||||||
|
80+ |
70– | |||||||||||
В клетке (2,3) имеем
![]() ,
,
Т. е. план![]() Не является оптимальным. Проставляем в эту клетку
Не является оптимальным. Проставляем в эту клетку![]() И составляем замкнутый маршрут. Получаем
И составляем замкнутый маршрут. Получаем ![]() . Опорный план
. Опорный план ![]() Приведен в табл. 6.9.
Приведен в табл. 6.9.
Итерация 2. Проверяем план ![]() На оптимальность. Так как для всех свободных клеток
На оптимальность. Так как для всех свободных клеток
![]() ,
,
То план ![]() – оптимальный и не содержит положительных перевозок по запрещенным маршрутам.
– оптимальный и не содержит положительных перевозок по запрещенным маршрутам.
Таблица 6.9
|
Vj Ui |
V1 = 3 |
V2 = 2 |
V3 = 1 |
V4 = 0 | ||||||||
|
U1 = 0 |
3 |
6 |
2 |
6 |
1 |
0 |
4 | |||||
|
80 | ||||||||||||
|
U2 = 5 |
8 |
7 |
M |
6 |
5 | |||||||
|
250 |
20 |
50 | ||||||||||
|
U3 = 2 |
5 |
5 |
4 |
3 |
2 |
M | ||||||
|
100 |
50 |
Минимальные транспортные расходы составляют 3000.
| < Предыдущая | Следующая > |
|---|