3.2. Задача о ранце
Напомним линейную булеву задачу о ранце, постановка которой приведена в Главе 1. Задана емкость ранца B>0 и множество предметов N={1,…,N}, каждый из которых JÎN имеет “ценность” Cj И “вес” Aj ³ 0. Требуется выбрать подмножество предметов максимальной суммарной ценности, общий вес которых не превосходит емкости ранца B. Вводя переменные Xj=1, если предмет JÎN кладется в ранец и Xj=0 в противном случае, запишем математическую модель проблемы:
|
Z= |
(3.2) |
|
|
(3.3) |
Для L=0,1,...,b и векторов (x1,...,xK), K=1,...,n рассмотрим семейство задач (PK(L)):
Sk(L)=![]()
![]()
Очевидно, оптимальное значение целевой функции исходной задачи (3.2)-(3.3) равно Z=SN(b). Заметим также, что
· если ![]() =0, то SK(L)=SK-1(L);
=0, то SK(L)=SK-1(L);
· если ![]() =1, то SK(L)=Ck+SK-1(L - Ak).
=1, то SK(L)=Ck+SK-1(L - Ak).
Отсюда следуют рекуррентные соотношения:
|
|
(3.4) |
Имеем S1(L)=0 при 0£ L < a1 и S1(L)=Max{0,c1} ПриL ³ a1. Далее, используя (3.4), находим S2(L),...,SN(L) Для всех L=0,...,b.
На обратном ходе ДП строится оптимальное решение задачи (3.2)-(3.3). Во время прямого хода мы можем запоминать все условно-оптимальные решения Xk(L), K=1,…N, L=0,1,...,b: Xk(L)=0, если SK(L)=SK-1(L), И Xk(L)=1, в противном случае. Решение восстанавливается с последней компоненты. Положим K=N, L=B. Если Xk(L)=0, то ввиду SK(L)=SK-1(L), полагаем ![]() =0. Если Xk(L)=1, то SK(L)=сK+SK-1(L-Ak) и полагаем
=0. Если Xk(L)=1, то SK(L)=сK+SK-1(L-Ak) и полагаем ![]() =1. Если K >1, то полагаем K=K-1, L=L-An
=1. Если K >1, то полагаем K=K-1, L=L-An![]() И повторяем итерацию.
И повторяем итерацию.
Как видно, оптимальное решение NP-трудной булевой задачи о ранце строится алгоритмом ДП с Псевдополиномиальной трудоемкостью O(nb).
 Разберем
Разберем
Пример 3.3. Решить задачу
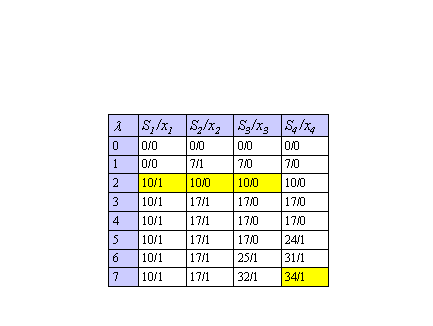
Воспользуемся соотношениями (3.4) и заполним Табицу 3.1, в каждой клетке (L,SK(L)) Которой, наряду со значением SK(L), будем запоминать условно-оптимальные решения Xk(L) (после символа “/”).
В результате прямого хода найдено оптимальное значение целевой функции S4(7)=34 и последней компоненты вектора-решения X4(7)=1. Следовательно, ![]() =1. Полагаем K =3, L = L - A4
=1. Полагаем K =3, L = L - A4![]() = 7 - 5 = 2. Строка L = 2 и столбец S2(2) Таб. 3.1 позволяют найти
= 7 - 5 = 2. Строка L = 2 и столбец S2(2) Таб. 3.1 позволяют найти ![]() =0. Следовательно, полагаем K =2, L = L - A3
=0. Следовательно, полагаем K =2, L = L - A3![]() = 2 - 0 = 2. Из таблицы видно также, что
= 2 - 0 = 2. Из таблицы видно также, что ![]() =0, а
=0, а ![]() =1.
=1.
В Таб. 3.1 затемнены клетки, позволившие восстановить оптимальное решение задачи.
 Таб. 3.1.
Таб. 3.1.
Пусть теперь переменные задачи о ранце принимают целочисленные неотрицательные значения. Задача перепишется в виде
|
Z= |
(3.5) |
|
|
(3.6) |
Погрузим задачу (3.5)-(3.6) в семейство {(P(A)), A=0,1,…,A}, где задача (P(A)):
S(A)=![]()
![]()
Теорема 3.1. Для задачи (3.5)-(3.6) справедливы рекуррентные соотношения:
|
S(A) = |
(3.7) |
(Максимум по пустому множеству полагаем равным нулю.)
Доказательство. Пусть X*(A) – оптимальный вектор. Тогда S(A) = (C, X*(A)). Если S(A)>0, то существует такой номером K, что X![]() (A)>0 и (C, X*(A)) = (C, X*(A) - Ek) + Ck, где Ek – K-й орт. Значит
(A)>0 и (C, X*(A)) = (C, X*(A) - Ek) + Ck, где Ek – K-й орт. Значит
S(A) £ S(A - Ak) + Ck £ ![]() {S(A - Ak) + Ck}.
{S(A - Ak) + Ck}.
С другой стороны
![]() {S(A - ak) + ck}= S(A - ai) + ci = (c, x*(A - ai)) + ci =
{S(A - ak) + ck}= S(A - ai) + ci = (c, x*(A - ai)) + ci =
(C, X*(A - Ai) + Ei) £ (C, X*(A)) = S(A). ¨
Соотношения (3.7) позволяют найти оптимальное значение функционала (3.5). Оптимальное решение находится по следующей процедуре.
Обратный ход. Положим X*=0, A*=А. Затем последовательно решаем уравнение:
|
S(A*) = S(A* - ak) + ck, ak £ A* |
(3.8) |
Относительно индекса K.
Если I – решение уравнения (3.8), то полагаем X![]() = X
= X![]() + 1; A*= A* - Ai и повторяем итерацию. Если уравнение (3.8) не имеет решения, тогда вектор X* оптимален.
+ 1; A*= A* - Ai и повторяем итерацию. Если уравнение (3.8) не имеет решения, тогда вектор X* оптимален.
Отношения (3.7) в случае целочисленных весов Ak, позволяют решить задачу (3.5)-(3.6) с псевдополиномиальной трудоемкостью - O(An) И памятью - O(A+N).
С задачей (3.5)-(3.6) тесно связана, так называемая, обратная задача:
|
|
(3.9) |
|
|
(3.10) |
Как и ранее, погрузим последнюю задачу в семейство {(![]() (B)), B=0,1,…,B}, где задача (
(B)), B=0,1,…,B}, где задача (![]() (B)):
(B)):
Q(B)=![]()
![]()
Пусть X0(B) – оптимальное решение задачи (![]() (B)).
(B)).
Лемма 3.2. Функция Q(B) является неубывающей.
Доказательство. Пусть B2>B1. Очевидно, X0(B2) - допустимое решение задачи (![]() (B1)). Следовательно, Q(B2)=(A, X0(B2))³ Q(B1).¨
(B1)). Следовательно, Q(B2)=(A, X0(B2))³ Q(B1).¨
Для обратной задачи справедливы рекуррентные соотношения:
Q(0) = 0; Q(B) = ![]() {Q(Max{0, B - Ck}) + Ak}, 0 £ B £ B,
{Q(Max{0, B - Ck}) + Ak}, 0 £ B £ B,
Благодаря которым оптимальное решение строится с трудоемкостью – O(NB) и памятью – O(B+N).
Теорема 3.2. (связь прямой и обратной задач о ранце). Пусть ![]() = Max{B| Q(B) £ A, B ³ 0}. Тогда S(A)=
= Max{B| Q(B) £ A, B ³ 0}. Тогда S(A)=![]() и оптимальное решение X0(
и оптимальное решение X0(![]() ) обратной задачи (
) обратной задачи (![]() (
(![]() )) является оптимальным и для прямой задачи (P(A)).
)) является оптимальным и для прямой задачи (P(A)).
Доказательство. Обозначим S*= S(A). Так как X*(A) – допустимый вектор для обеих задач (![]() (S*)) и (P(A)), то Q(S*)
(S*)) и (P(A)), то Q(S*) ![]() (A, X*(A)) £ A. Из неравенства Q(S*) £ A и определения
(A, X*(A)) £ A. Из неравенства Q(S*) £ A и определения ![]() следует, что
следует, что ![]() ³ S*. С другой стороны, так как оптимальное решение X0(
³ S*. С другой стороны, так как оптимальное решение X0(![]() ) обратной задачи (
) обратной задачи (![]() (
(![]() )) Является допустимым для прямой задачи (P(A)) (так как (A, X0(
)) Является допустимым для прямой задачи (P(A)) (так как (A, X0(![]() )) = Q(
)) = Q(![]() ) £ A), то
) £ A), то ![]()
![]() (C, X0(
(C, X0(![]() )) £ (C, X*(A)) = S* . Значит,
)) £ (C, X*(A)) = S* . Значит, ![]() = S* = S(A) и (C, X0(
= S* = S(A) и (C, X0(![]() )) = S(A).¨
)) = S(A).¨
Следствие 3.1. В случае целочисленных Ck и произвольных Ak для решения прямой задачи о ранце можно использовать алгоритм ДП, имеющий трудоемкость O(NS*) и память O(S*+N), где S*=S(A)£ A![]() Ck.
Ck.
Доказательство. Из Леммы 3.1 и Теоремы 3.2 следует, что
S* = min{B| A < Q(B+1), B = 0,1,…}.
Значит, можно применить следующий алгоритм.
- Во время работы прямого хода вычислить Q(B), полагая последовательно B = 0,1,…, пока для некоторого ![]() не получим неравенство А< Q(
не получим неравенство А< Q(![]() +1). Это
+1). Это ![]() и есть оптимальное значение целевой функции S* прямой задачи (P(A)).
и есть оптимальное значение целевой функции S* прямой задачи (P(A)).
- На обратном шаге, зная значения Q(B), B=0,1,…,S*, найдем оптимальное решение X0(S*) обратной задачи (![]() (S*)), которое является также искомым решением X*(A) прямой задачи (P(A)).¨
(S*)), которое является также искомым решением X*(A) прямой задачи (P(A)).¨
Сформулируем аналогичные утверждения, позволяющие перейти от обратной задаче к прямой.
Теорема 3.3. Пусть ![]() = Min{A| S(A) ³ B, A ³ 0}. Тогда Q(В) =
= Min{A| S(A) ³ B, A ³ 0}. Тогда Q(В) = ![]() и оптимальное решение X*(
и оптимальное решение X*(![]() ) Прямой задачи (P(
) Прямой задачи (P(![]() )) является также оптимальным решением X0(В) обратной задачи (
)) является также оптимальным решением X0(В) обратной задачи (![]() (В)).
(В)).
Следствие 3.2. В случае целых Ak И произвольных Ck обратная задача (![]() (В)) Может быть решена алгоритмом ДП с трудоемкостью O(
(В)) Может быть решена алгоритмом ДП с трудоемкостью O(![]() N) и памятью O(
N) и памятью O(![]() + N), где
+ N), где ![]() =Q(B) £ B
=Q(B) £ B![]() Ak.
Ak.
Переход от прямой задаче к обратной и наоборот оправдан не только в случае нецелочисленности одной группы параметров и целочисленности другой. Иногда этот переход позволяет уменьшить трудоемкость реализации алгоритма ДП.
Задача о ранце в общем случае нелинейна. Функционал может быть задан произвольными сепарабельными функциями. Запишем общую формулировку:
|
S*=S(A)= |
(3.11) |
|
|
(3.12) |
Где Fj Зависят только от Xj (свойство сепарабельности).
Как и прежде, наряду с задачей (3.11)-(3.12) рассмотрим семейство задач с количеством предметов K=1,…,N и емкостью ранца A=0,…,A. Обозначим через Sk(A) оптимальное значение функционала соответствующей задачи. Тогда для (3.11)-(3.12) справедливы соотношения:
S1(A) = ![]() F1(X1), 0£ A £ A;
F1(X1), 0£ A £ A;
Sk(A) = ![]() { Sk-1(A - Akxk) + Fk(Xk)}, K=2,…,N, 0£ A £ A.
{ Sk-1(A - Akxk) + Fk(Xk)}, K=2,…,N, 0£ A £ A.
Приведенные рекуррентные соотношения справедливы для любых Ak и Fk, но для конечности реализации алгоритма необходима конечность значений аргументов функций Sk(A). Для этого достаточно потребовать целочисленность Ak. Тогда достаточно перебрать конечное множество значений A=0,…,A.
| < Предыдущая | Следующая > |
|---|